
辰龙AI教育机器人底盘安装指南
1. 开箱检查
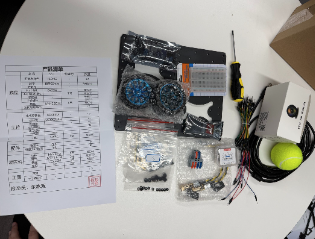
📦 开箱步骤
打开包装,取出清单,根据清单核对箱内物品,确保无损失、损坏。
2. 底盘安装
🛠️ 底盘安装步骤
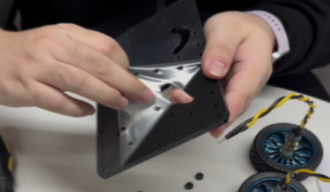
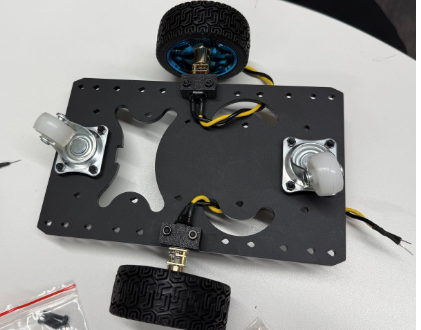
拿出两块亚克力底盘(上下底盘规格一致),撕去两边的保护膜 × 2
注:新版为3D打印底盘,无需撕膜
2.1. 安装电机 × 2
-
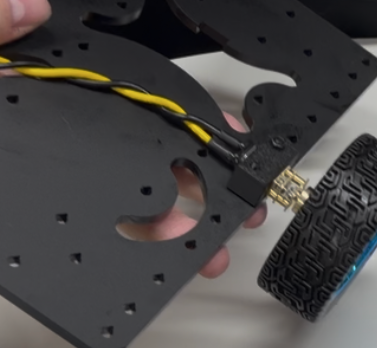
取出电机组件:
- 拿出7号包装袋,取出N20电机和3D打印连接件
- 连轴器已预先安装好
⚠️ 新版注意事项:
- 需要自行安装连轴器
- 取出5号袋中的上针螺丝和内六角螺丝刀
- 将N20电机的轴插入连轴器
- 注意:连轴器上的孔要对准电机轴的平面
- 用内六角螺丝刀和上针螺丝将连轴器固定好
-
安装电机:
- 将电机嵌入3D打印件的缺口
- 将3D打印件的孔对准底盘两侧的安装孔
- 轮子可暂不安装
-
固定螺丝:
- 拿出4号包装袋,取出4枚2cm螺丝
- 拿出6号包装袋,取出4枚螺母
- 将螺丝穿过对准的安装孔
- 另一侧用螺母固定
- 用随包附赠的螺丝刀拧紧
另一侧同理安装
2.2. 安装万向轮 × 2
-
准备材料:
- 拿出轮胎和万向轮的袋子,取出两个万向轮
- 拿出5号袋,取出8个万向轮增高垫
- 拿出6号袋,取出8个螺母
- 拿出3号袋,取出8个1.6cm螺丝
-
安装步骤:
- 将万向轮安装在小车同侧
- 万向轮和底板之间用增高垫垫高
- 将螺丝反过来固定,避免万向轮和螺丝碰撞
- 对侧用螺母固定
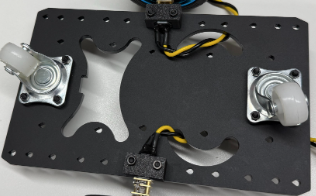
⚠️ 重要提示:注意固定万向轮的螺丝方向

2.3. 安装轮胎 × 2
-
准备材料:
- 拿出轮胎和万向轮的袋子,取出两个轮胎
- 拿出5号袋,取出里面的两枚M4螺丝
-
安装步骤:
- 将连轴器的六角形插入轮胎的内六角缺口
- 用M4的螺栓从对侧固定


✅ 安装好轮胎后,整个底盘部分安装完成
3. 控制部分安装
⚡ 控制部分安装步骤
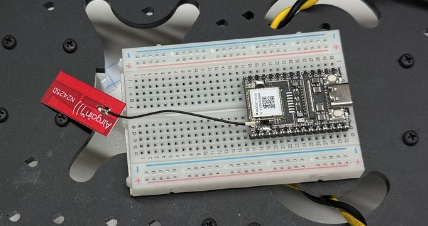
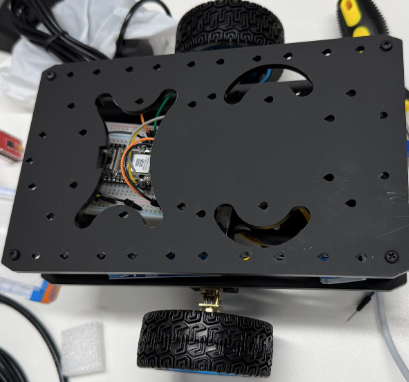
3.1. 安装主控板
-
准备主控:
- 取出装着荔枝派的小盒
- 取出面包板,放到没有万向轮的那一侧
-
插入主控:
- 将荔枝派插在面包板上,注意针脚对齐
- 建议:Type-C口朝外
- 新面包板较紧,对准后用双手挤压插入
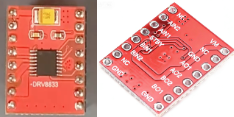
3.2. 安装底盘控制板
- 取出控制板:
- 拿出底盘控制板小袋
- 打开拿出里面焊好的红色小控制板DRV8833
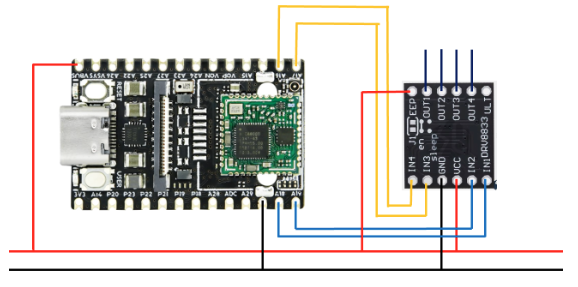
- ⚠️ 注意:黑色DRV8833的针脚与红色款不同(线路图见本章末尾)
- 插入控制板:
- 将其插到面包板上
- 同样面包板较紧,对准后用双手挤压插入
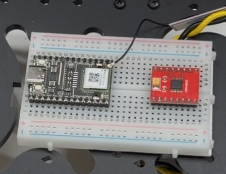
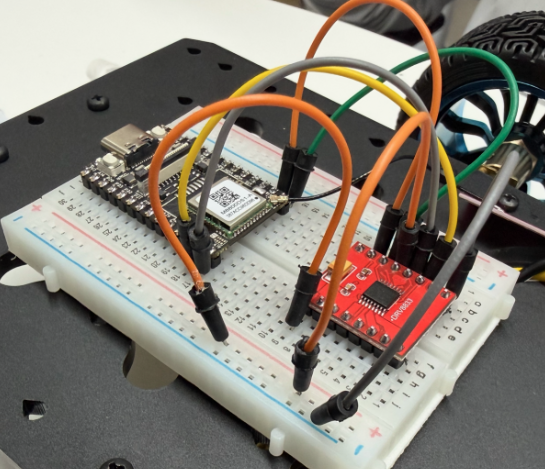
3.3. 接线步骤
📌 准备线材: 拿出一捆面包板线,将扎带打开
🔌 连接左侧引脚:
- 将 AIN1 和 AIN2 连接到主控的PWM引脚
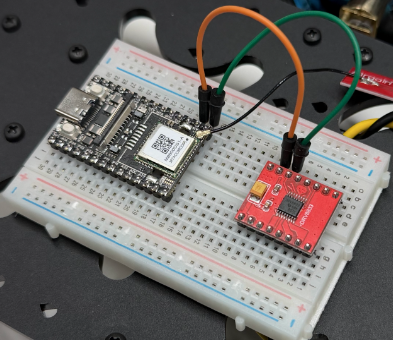
- 连接 STBY 到 5V
- 连接 BN1 和 BN2 到主控的PWM引脚
- NC置空,GND接地
✅ DRV8833左侧连接完成
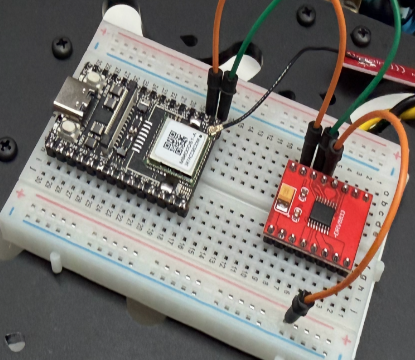
🔌 连接右侧引脚:
- VM 连接电源正极
- NC置空,两个 GND 引脚接地
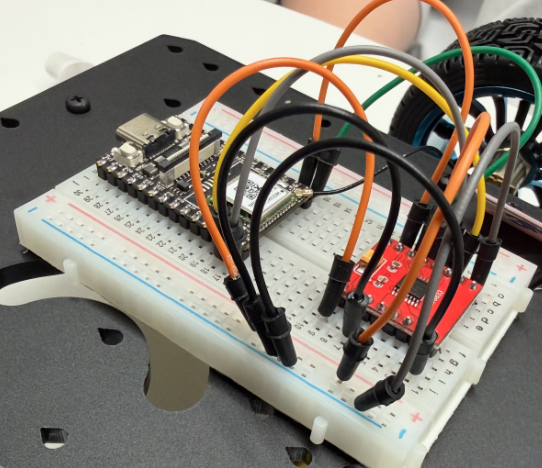
🔌 连接电机:
将电机连接上 AO1、AO2、BO1、BO2
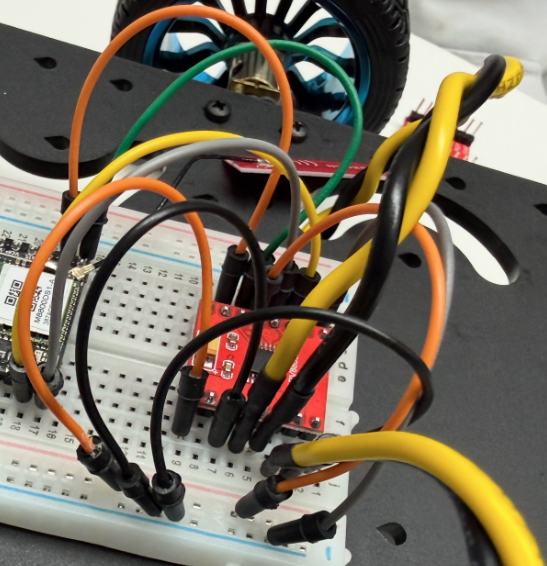
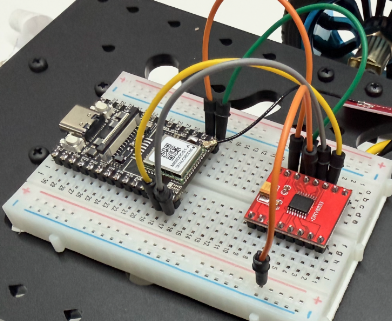
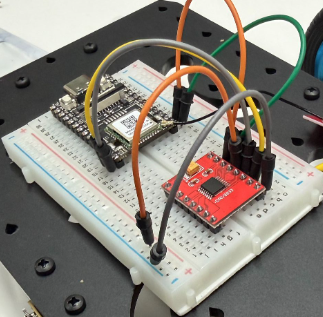
⚠️ 注意事项:
- 注意主控和底盘控制板共地
- 避免天线短接引脚
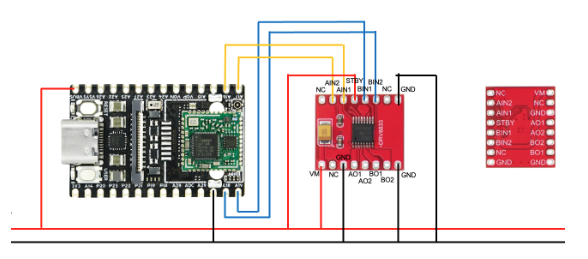
🖥️ 黑色板接线参考:
对于黑色板的DRV8833,可参考如下线路图进行接线
3.4. 安装12V→5V降压模块
-
准备材料:
- 拿出2号袋中的4根电线
- 配置:一对两边植锡 + 一对一边植锡一边针脚
- 拿出蓝色的降压模块
-
接线步骤:
- 将两边植锡的一对插入降压的输入端子并拧紧
- 注意正负极!
- 将带针脚的一对,植锡端插入输出端子并拧紧
- 注意:输出端子背面标有5V
- 针脚按照正负极插入面包板
- 将降压输入端另一头插入2分4端子输出端的2个孔里
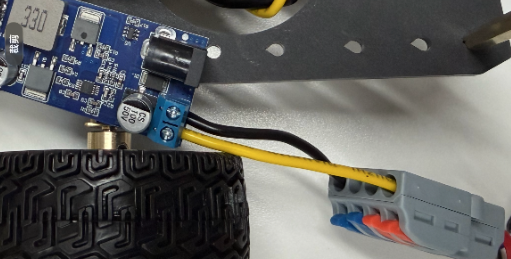
✅ 底盘的线路连接完毕
3.5. 底盘调试
-
连接电源:
- 将电池附带的裸头线插入分线端子的输入端
- 为保证电源输出头正常接触,可剥开一段再压紧
- 注:新版已帮忙接好端子
-
通电测试:
- 确认无接线问题后将电池端子插入
- 通电后降压模块亮灯
- 主控板红灯常亮,蓝灯闪烁
-
连接控制:
- 等待1-2分钟
- 连接 chenlong-robot-数字 的WiFi
- 在浏览器输入 192.168.4.1
- 打开遥控器界面

-
测试控制:
- 按前后左右可控制小车移动
- 如左右两轮转向不对,断电调整主控板上PWM接口的线序,再上电测试
3.6. 安装上盖
-
准备材料:
- 拿出1号袋的4个铜柱
- 拿出3号袋的8个螺丝(新版为8号袋)
-
安装步骤:
- 通过螺丝将铜柱固定在底盘
- 摆好各种电子元件
- ⚠️ 避免降压模块底角被螺丝短路
- 将上盖放在铜柱上
- 调整线束避免从面包板上脱落
- 对准铜柱孔眼后,用螺丝拧紧
✅ 整个底盘安装完成
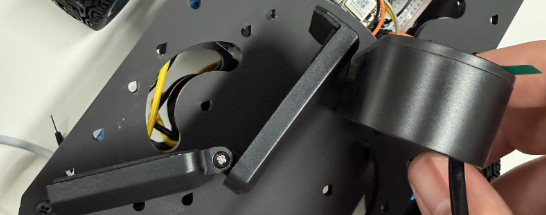
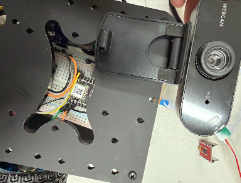
3.7. 摄像头安装
-
拆卸固定件:
- 拿出摄像头
- 用螺丝刀拧开图上轴里的螺丝
- 将固定销推出
-
取下下板:
- 拿下下板

-
安装摄像头:
- 将摄像头下面的突起对准上板的凹槽
- 卡入固定
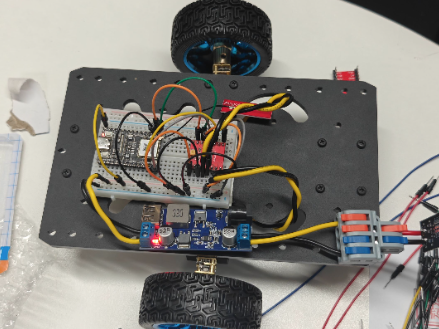
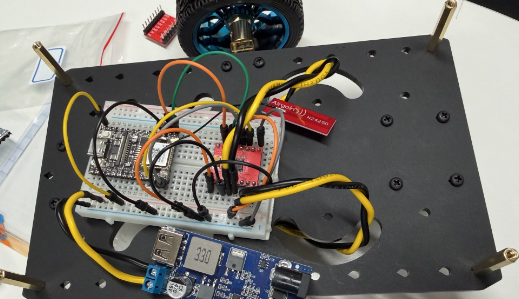
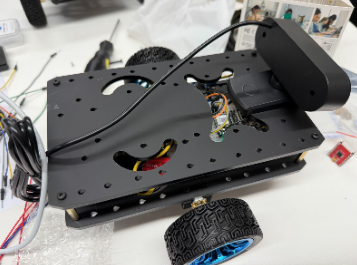
🎉 底盘安装完成!
📋 后续安装计划
待续内容:
- 安装机械臂控制板
- 调试舵机
- 安装机械臂
- 整车调试
辰龙AI教育机器人调试指南
1. 镜像烧录
✅ 已完成预烧录,无需操作
2. 源码库下载
代码库位置:https://github.com/chenlongos/AKA-00
3. 代码向机器人迁移
可通过SCP命令传输修改后的代码
scp 本地文件路径 root@目标IP:4. 项目启动
目前为上电自启,连接WiFi即可获取IP
5. 代码调试和修改
详细调试方法将在后续更新中补充...📸 整机样式
